初步了解航空航天领域的基础知识、基本原理
1. 航空航天发展概况
1.1 航空航天的基本概念
- 人类扩展空间的产物
- 21 世纪最活跃与最有影响的科学技术领域
- 高度综合的现代科学技术
- 对军事、经济和社会生活有重大影响
航空
NOTE
航空的概念:
航空是指载人或不载人的飞行器在地球大气层中的航行活动,必须具备空气介质。
NOTE
航空有军用航空和民用航空之分
航天
NOTE
航天的概念:
航天是指载人或者不载人的航天器在地球大气层之外的航行活动,又称之为空间飞行或宇宙航行。
1.2 飞行器的分类与构成
飞行器分为三类:航空器、航天器、火箭和导弹
航空器:在大气层内飞行的飞行器
航天器:主要在大气层外空间飞行的飞行器
火箭和导弹:以火箭发动机为动力升空,可以在大气层内外飞行
航空器
航空器成功飞行的三要素为:
- 有克服自身重力的向上升力
- 飞行必须具备动力装置产生推力或拉力来克服前进的阻力
- 稳定性和操纵性好
航空器的分类:
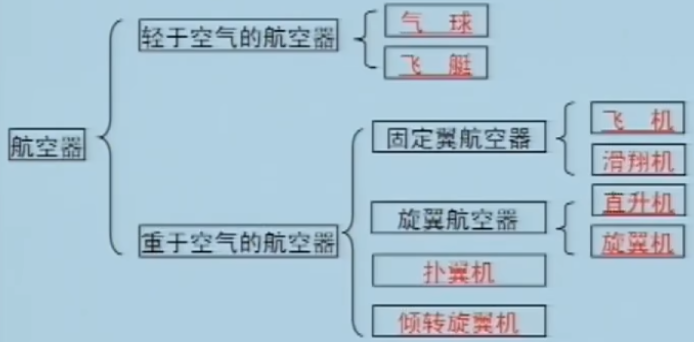
滑翔机和旋翼机基本没有动力飞行
倾转旋翼机是可以变化的,既可以是固定翼也可以是直升机
航天器
在地球大气层以外的宇宙空间,基本上按照天体力学的规律(运动的各类飞行器)
IMPORTANT
航天器按照轨道动力学原理进行运动
航空器按照空气动力学原理进行运动
航天器的分类
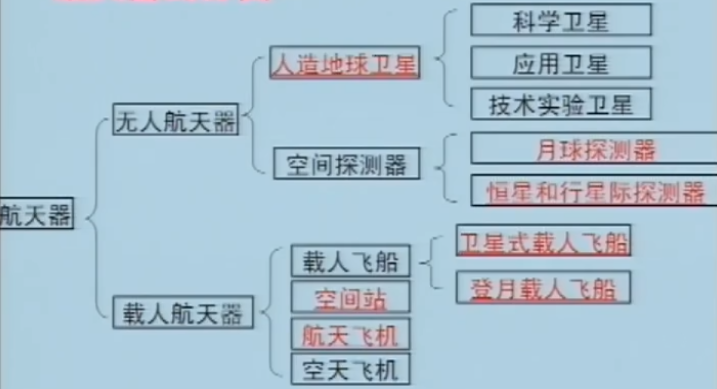
航天飞机是起飞的时候靠火箭,降落靠飞翔
空天飞机是起飞和降落都是飞翔
火箭与导弹
火箭与导弹一般只能用一次
火箭:靠火箭发动机提供推进力的飞行器,运载有效载荷到空间
导弹:导弹是一种飞行武器,依靠制导系统控制轨迹
1.3 航空航天发展概况
从梦想、传说、神话
首先出现的飞艇,然后出现的是飞机
2. 飞行器飞行原理
重于空气的航空器需要以一定的速度在空气中运动,才能产生足够的升力。
飞行环境
飞行环境对飞行器的结构、材料、机载设备和飞行性能都有着非常重要的影响。
飞行环境包括 1. 大气飞行环境 2. 空间飞行环境
大气环境是航空器唯一的飞行环境,也是航天器、火箭和导弹必经的飞行环境。
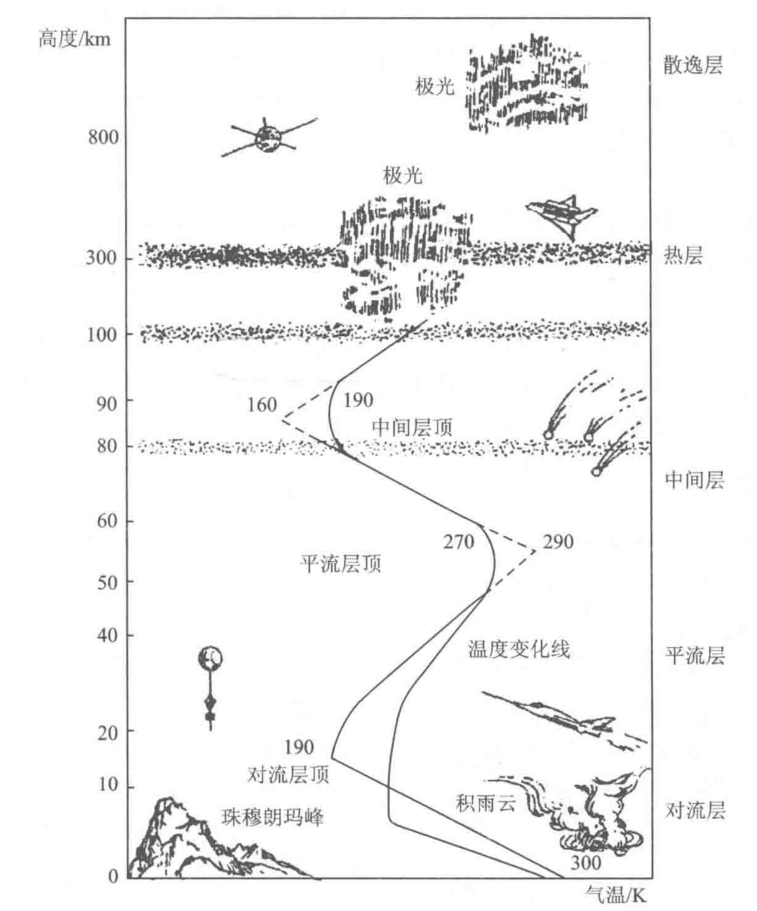
大气层中空气的密度、温度、压强等参数是随高度的变化而变化的。
大气层分为:对流层、平流层、中间层、热层和散逸层
空间环境
空间飞行环境主要是指真空、电磁辐射、高能粒子辐射、等离子体和微流星体等所形成的飞行环境,是航天器飞行的主要环境
空间环境包含:地球空间环境、行星际空间环境、恒星际空间环境
地球空间环境包含:地球高层大气环境、电离层环境和磁环境。
行星际空间是指太阳系内围绕着太阳和行星的空间范围,具有极高的真空度、低温和失重等特点,并存在着太阳连续发射的电磁辐射、爆发性的高能粒子辐射和稳定的等离子体流(太阳风)。
恒星际空间环境是指太阳系以外的各恒星之间的空间范围,非常接近完全的真空,但也并非绝对的真空。
大气的物理性质
大气的状态参数和状态方程
大气的状态参数是指它的压强
气体状态方程:
其中,
连续性
在研究飞行器和大气之间的相对运动时,气体分子之间的距离完全可以忽略不计,把气体看作是连续的介质。(连续性假设)
在航天器所处的高空大气,由于气体分子的自由行程与飞行器外观尺寸的数量级更大,所以不能看作是连续介质
粘性
大气的黏性是空气在流动过程中表现出的一种物理性质。
大气的黏性力是相邻大气层之间相互运动时产生的牵引作用力,也叫大气的内摩擦力(大气相邻流动层间出现滑动时产生的摩擦力)
NOTE
本质是气体分子之间的内聚力阻止大气分子的相对运动。相邻大气层之间分子的不规则运动导致的分子迁移使得分子间产生动量交换。
黏性与不同流体有关系,不同的流体之间黏性不同
流体的黏性与温度也有关系。温度升高,气体黏性增加,液体减小。
可压缩性
当气体的压强改变时,其密度和体积也改变。
大气流速较高,必须考虑大气的可压缩性
声速
介质的可压缩性越大,声速越小;介质的可压缩性越小,声速越大;
对于不可压缩介质,声速将趋于无限大
气体流动的基本规律
流体在流动的过程中其物理参数均会发生变换。
流体在变换过程中必须要遵循基本的物理定律
空气动力的产生
重于空气的飞行器,是靠飞行器与空气做相对运动所产生的空气动力,克服自身重力而升空的。
飞行器飞行时和空气之间有相对运动,在飞行器上也会产生空气动力。空气动力与飞行器和空气之间的相对运动速度有很大关系。
空气动力是飞行器在空气中以一定速度运动的结果。
连续性定理和伯努利定理
流体流动的连续性定理与连续性方程
连续性定理是质量守恒定律在流体流动中的应用,它描述的是流体在流动过程中流体流动速度和流动面积之间的变化规律
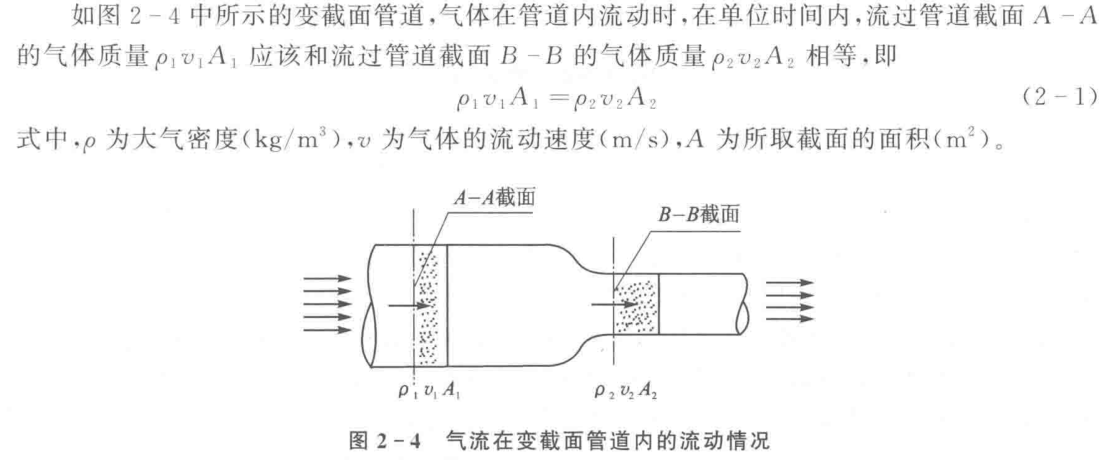
将上图中的内容推而广之,则气体流过变截面管道中任意界面处的
可压缩流体沿管道流动的连续性方程:
当气体以低速流动时,可以认为气体是不可压缩的,也就是密度
不可压缩流体沿管道流动的连续性方程:
静压 + 动压 = 总压 = 常数
P + \frac{1}{2}\rho v^{2} = 常数
\begin{align*} p_{1} + \frac{1}{2} \rho v^{2}1 = p + \frac{1}{2} \rho v^{2}2 = p + \frac{1}{2} \rho v^{2}_3 = \cdots = \text{常数} \end
Ma = \frac{v}
Y = \frac{1}{2}C_{l} \rho v^{2}S
v_{min} = \sqrt{ \frac{2G}{\rho C_{l max}S} }
r = \frac{p}{1 + e \cos f}
F= q_{mi}(v_{e}-v_{0})+ q_{mo}v_{e}A(p_{e}-p_{0})
F=q_{mp}v_{c} + A(p_{e} - p_{0})
I = \int_{0}^{t_{a}}Fdt
I = F \cdot t_
\rho_{i} = r_{i} + c \Delta t
\sqrt{ (x - x_{i}) ^{2} + (y-y_{i})^{2}+(z-z_{i})^{2}} = \rho_{i} - c\Delta t
比强度= 抗拉强度(\sigma_{b}) / 密度(\rho)
比刚度 = 弹性模量(E) / 密度(\rho)
V_{b} = I_{s} \ln \frac{1}{\mu_{b}}
\mathrm{Re} = \rho\frac{ {v\cdot l}}{\mu}